
Podcast: Play in new window | Download
Subscribe: Apple Podcasts | RSS
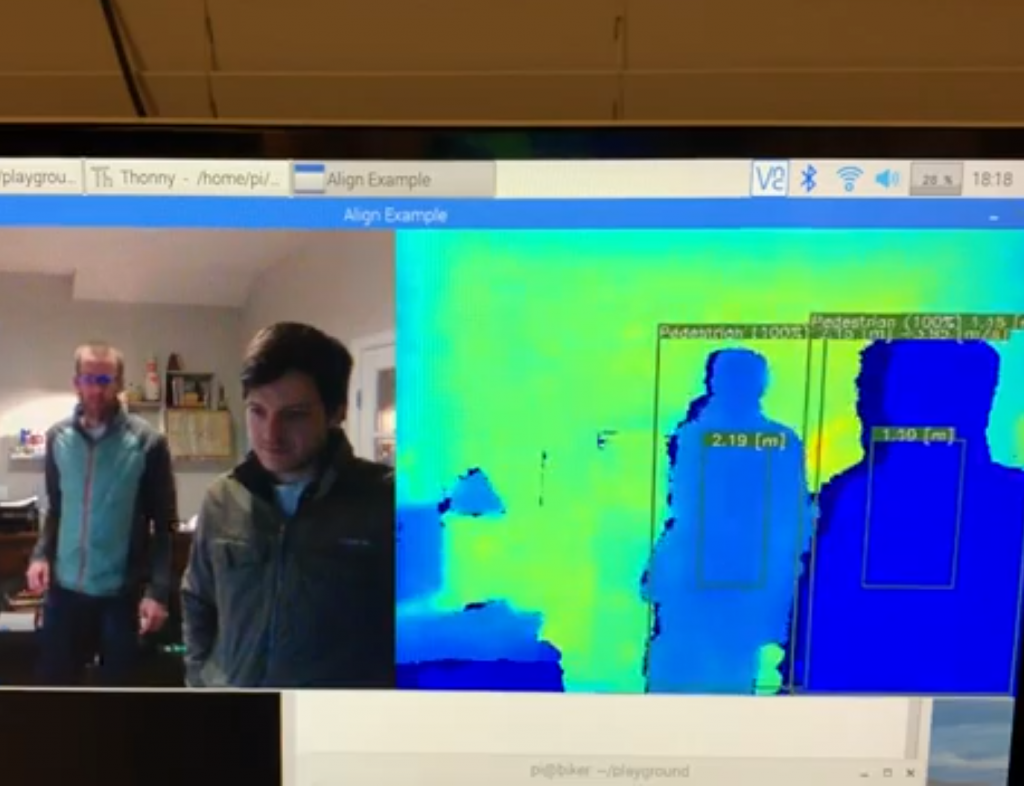
Welcome Brandon Gilles and Brian Weinstein of Luxonis Holding Corporation
- They make the DepthAI system, which uses the Intel Movidius Myriad X
- It was initially created for life safety problems, specifically targeted at distracted drivers.
- There is research that a car horn on a bike can help to lower fatal interactions.
- Brandon had multiple people in his life hurt or killed by cars while biking.
- Though a systemic change is needed, a tech solution is more likely in the short term.
- They built a hardware protoype and spent a couple hours of coding to prove out the concept.
- “Depth perception + CV is a cheat code”, but it needs to be useful in the physical world
- No way to embed this much power
- Current depth cameras on the market
- Two camera solution senses the disparity in the images
- AI (OpenCV) helps tell what is there (Car, bus, etc)
- Intel compute sticks
- Combining depth plus AI
- There are other Myriad X SOMs
- Jay Carlson episode where he was talking about SOMs and MIPI
- 2 lane vs 4 lane MIPI
- Base boards open source on github
- Luxonis did a Kickstarter with OpenCV and raised $1.4M
- Working with vendors
- Niche that didn’t exist: embedded, low cost, fast boot, performant
- OpenCV is a compiled library
- PyTorch
- DNN Module
- DARPA grand challenge
- OpenCV is a huge community
- The DepthAI has bindings for ROS/Python
- What is the Myriad X chip background?
- Intel bought the Movidius team in 2016 (Vox)
- 28 processors on the die, with a “Network on chip architecture“
- What gets access to the data from the camera first?
- It is flexible, so the software configures it
- Asymmetric fell out of favor
- Geometries of the boards for the Kickstarter
- 0.4mm pitch, 400 pin BGA
- OAK-1 has the color camera, OAK-D has the color camera plus stereo vision
- December delivery, which they are on time for
- Possible to get the boards right now at higher prices
- They are working with Arducam to try and source different camera modules.
- Lower cost overall will come from lower cost cameras
- Camera module industry is very opaque
- This is why there is a custom RPi camera
- IMX 378
- Apple and Android are doing visual depth preception on phones, including Apple’s new LiDAR on the iPhone
- Luxonis did a competition around spatial AI and got over 300 entries
- Many of the entries involved “giving another sense” to the visually impared.
- Following the bald referee
- Privacy centric
- What is edge computing?
- “Embedded is barely a thing yet for AI”
- OpenMV by Kwabena Agyeman works on a ST part
- They are working on building out the team.
- If you’re a PCB layout engineer proficient in Altium, send them an email. (remember: The Amp Hour always recommends sharing a portfolio of your work)
- SOM Info, including the pinout of the connector on the SOM, is on the github
- For more information, check out Luxonis.com
Many thanks to our Patrons! You can join at Patreon.com/TheAmpHour if you’d like to join the crowd. A special thanks to our corporate sponsor Binho, who now distribute the Sensepeek PCBite.